|
RobotKit API
|
|
RobotKit API
|
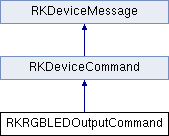
Class that encapsulates a set RGB LED output command. More...
#import <RKRGBLEDOutputCommand.h>
Public Member Functions | |
| (id) | - initWithRed:green:blue: |
Static Public Member Functions | |
| (void) | + sendCommandWithRed:green:blue: |
| (float) | + currentRed |
| (float) | + currentGreen |
| (float) | + currentBlue |
Properties | |
| float | red |
| float | green |
| float | blue |
This class is used to change the red, green, blue brightness of the RGB LED on a Sphero.
| + (float) currentBlue |
The current RGB LED blue value that was successfully sent to the device.
| + (float) currentGreen |
The current RGB LED green value that was successfully sent to the device.
| + (float) currentRed |
The current RGB LED red value that was successfully sent to the device.
| - (id) initWithRed: | (float) | red | |
| green: | (float) | green | |
| blue: | (float) | blue | |
Initializer for the object.
| red | The red brightness value between 0.0 to 1.0 with 0.0 being off and 1.0 being full brightness. |
| green | The green brightness value between 0.0 to 1.0 with 0.0 being off and 1.0 being full brightness. |
| blue | The blue brightness value between 0.0 to 1.0 with 0.0 being off and 1.0 being full brightness. |
| + (void) sendCommandWithRed: | (float) | red | |
| green: | (float) | green | |
| blue: | (float) | blue | |
Convience method for sending the command to the device.
| red | The red brightness value between 0.0 to 1.0 with 0.0 being off and 1.0 being full brightness. |
| green | The green brightness value between 0.0 to 1.0 with 0.0 being off and 1.0 being full brightness. |
| blue | The blue brightness value between 0.0 to 1.0 with 0.0 being off and 1.0 being full brightness. |
- (float) blue [read, assign] |
The blue brightness that is sent with the command.
- (float) green [read, assign] |
The green brightness that is sent with the command.
- (float) red [read, assign] |
The red brightness that is sent with the command.
 1.7.4
1.7.4

